電子工作:魚キャッチセンサー(ジャイロセンサ+Raspberry Pi2) No.01の続きです。
【プロトタイプ作成】
プロトタイプとしてジャイロセンサ(L3GD20)に対して配線と抵抗を図1のように,半田付けしました。
配線は,基板の裏側と基板の側面にて行った。図1は,ジャイロセンサ(L3GD20)を裏側から見た時の配線概要となる。
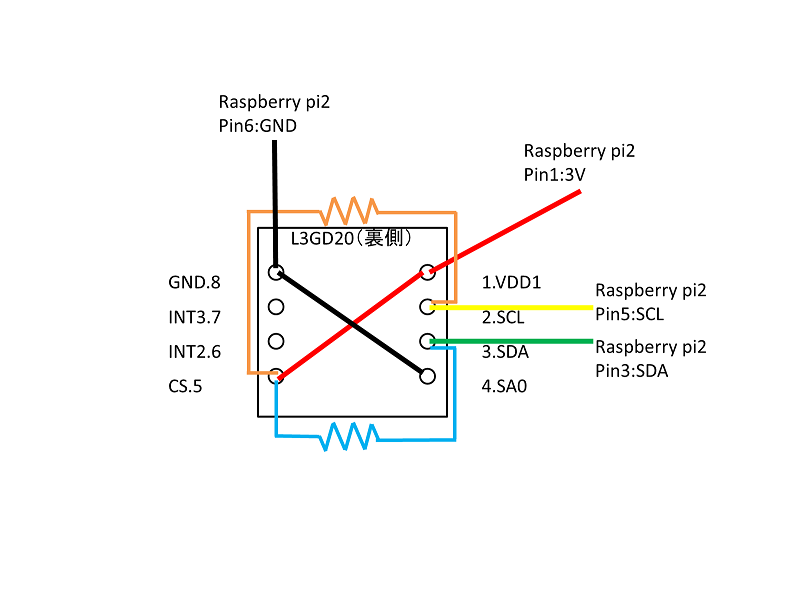
図1 基板配線概要
半田付け後,ホットボンドにて部品を固定した。
少々見た目が汚いホットボンドと半田付けの結果が図2,3となる。
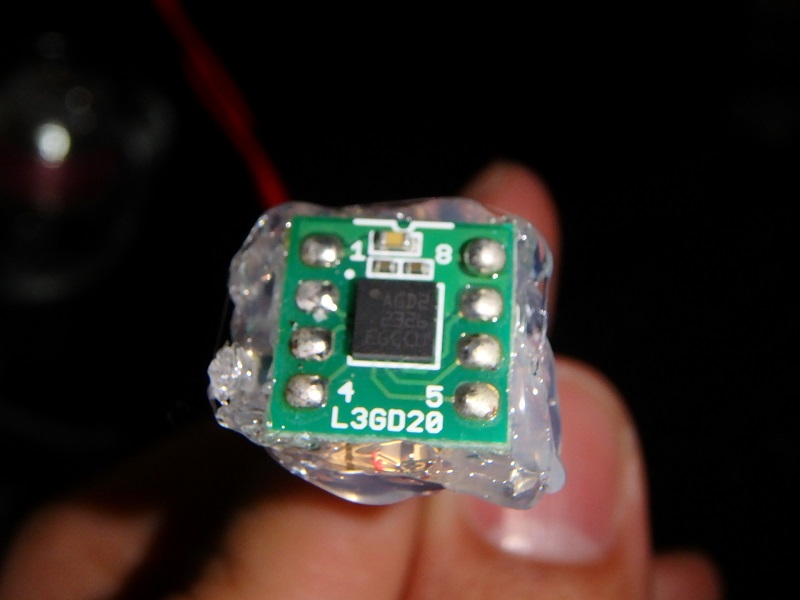
図2 半田付け後,ホットボンド結果(正面)
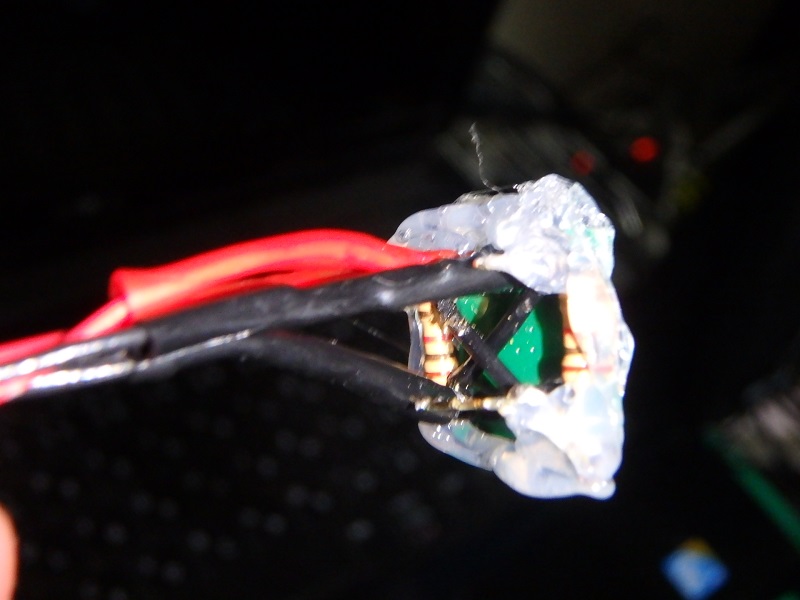
図3 半田付け後,ホットボンド結果(後方)
ジャイロセンサ(L3GD20)と反対側の配線は,図4のようにジャンパーケーブル(メス)と取り付けた。
これにより,Raspberry Pi2の対応Pinに直接接続することができる。
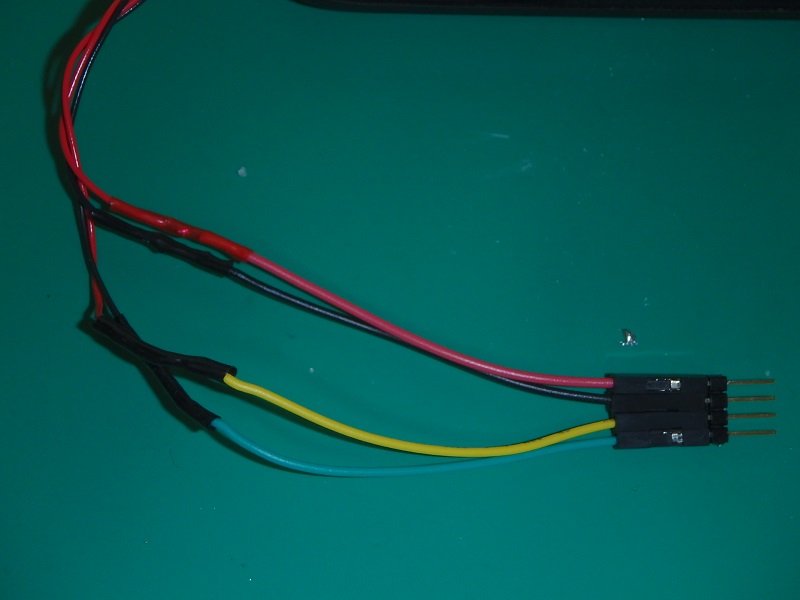
図4 ジャイロセンサ(L3GD20)の逆側:ジャンパーケーブル(メス)と接続
続いて,ジャイロセンサ(L3GD20)を釣竿に装着するため,図5の釣りのアクセサリを改造しました。

図5 DAITOU(ダイトウブク) 鈴ホタルW-小
改造は,鈴の根元をカットし,バネの部分はそのまま使うこととしました。(※バネの部分ですが,結構固く,配線を剥くストリッパーの歯が欠けてしまいました。)
仮止めですが,とりあえず図6のような形で釣竿に装着しました。

図6 ジャイロセンサ(L3GD20)の装着
以上で,一通り必要なものはそろったので,簡単なデモ構成を組んでみました(図7)。
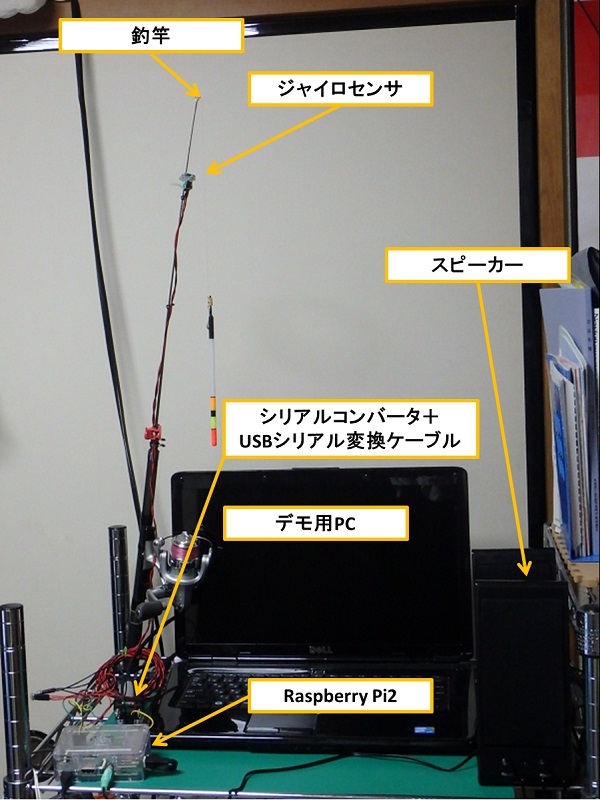
図7 デモ構成
次は,実際に動かしたときの動画を撮影次第アップしたいと思います。
4/25に 電子工作:魚キャッチセンサー(ジャイロセンサ+Raspberry Pi2) No.03(実際に動かしたときの動画)をアップしました。