新型コロナウィルスも落ち着いてきた今日この頃,今年もMaker Faire Tokyoが開催されることを願い,Maker Faire Tokyo 2020に向けた申し込み用の作品プロトタイプを作ってみました。
【作品の動画説明】
【作品について】
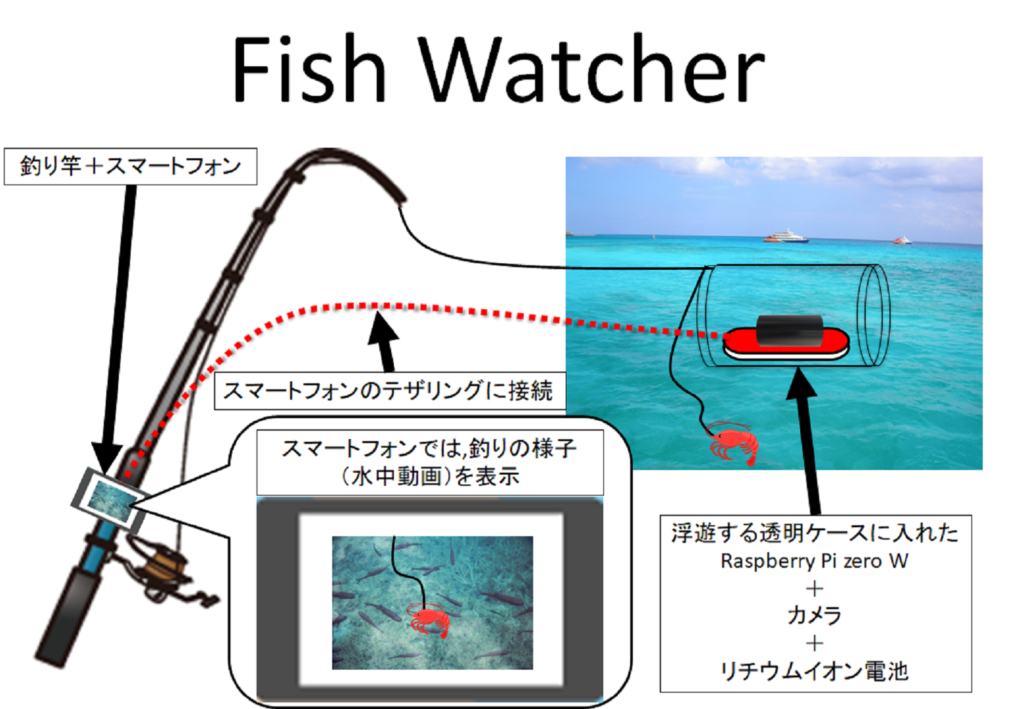
Fish Watcherは,「釣り竿+スマートフォン」,「浮遊する透明ケースに入れたRaspberry Pi zero W+カメラ+リチウムイオン電池」の構成となっています。
スマートフォンは,テザリングにてRaspberry Pi zero WとWifiで接続します。
Raspberry Pi zero Wは,Python Tornade Webサーバーとして,カメラ画像をWebSocketにて配信します。
釣りをしている際に,水中の様子を見られるようにするための作品となっています。

実際のプロトタイプ試作機がこちらになっており,こちらの画像は既に動作していて,Raspberry Pi zero Wについているカメラから釣り竿のリールが映し出されている様子です。
お風呂場での実験では,ケースが水上を移動し,それに合わせてスマートフォンの水中動画も動くことが確認できました。
【Fish Watcherの応用】
カメラが無線化となったことから,カメラの位置を色々と変えられる。
のうぐらぼの作品への適用としては,Maker Faire Tokyo 2018,2019で紹介した鳥獣ジャマー用のカメラを無線化するなどを考えている。
画像を受信する側がPC等で,ある程度の処理性能がある機器であれば,物体認識処理をすることもできるので,他の用途としても使えそう。

実際に,鳥獣ジャマーで使用していた学習済みモデルを使い,Raspberry Pi zero Wから送られてくる画像を用いて,物体認識をさせてみました。
カクカクの動きですが,物体認識できていることが確認できました。
【まとめ】
・Fish Watcherにより,カメラの無線化を実現。
・お風呂場の実験では,それなりに動画を確認できた。
⇒釣りでの実験は後日実施。
・PC等で動画を取得すれば,物体認識処理を入れたシステムの構築ができる。
⇒いろいろな用途として使えそう。
・動画の描画速度の改善は今後の課題。
とりあえず,非常事態宣言が解除されたので,近いうちにFish Watcherを使って釣りをしに行きたいと思います。