最近,自宅の庭に不審者が入り込んだり,ニュースでは農産物が窃盗、鳥獣被害等いろいろなことが起きています。
いつどこで誰(人,鳥獣等)が何をしているかわからないまま被害に合うのが嫌だなと思い,不審者の検知、鳥獣を検知+追い払いをするための
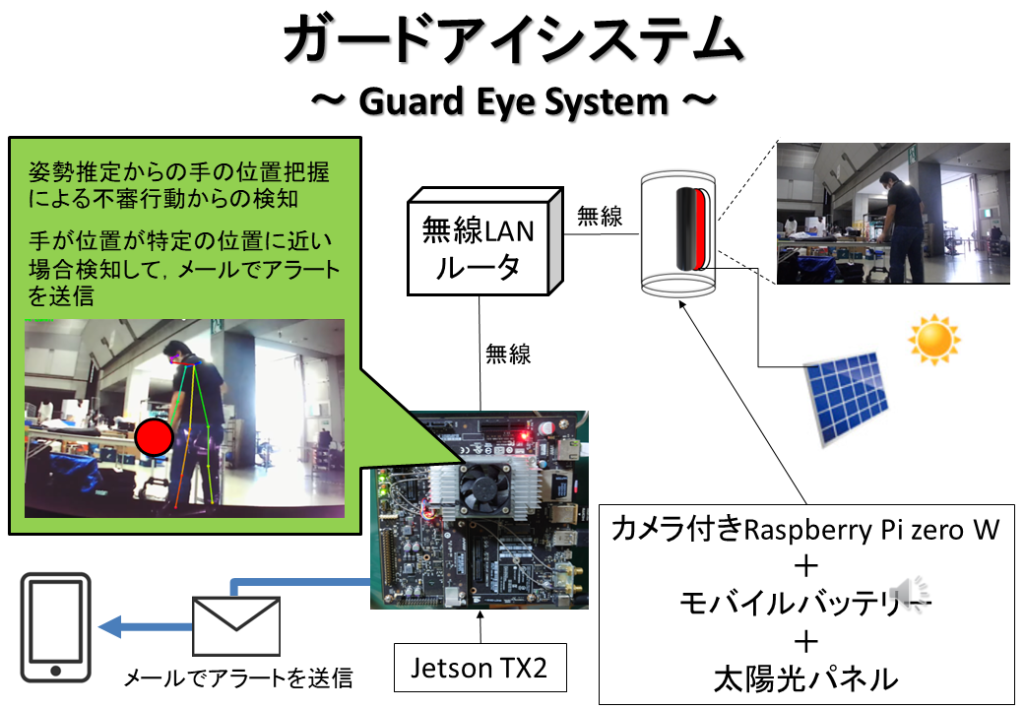
ガードアイシステム+~ Guard Eye System+ ~
を考えてみました。(2023年開発物に2019年MFT作品を追加したものを作成するので,昨年の作品名にプラス+をつけてます)
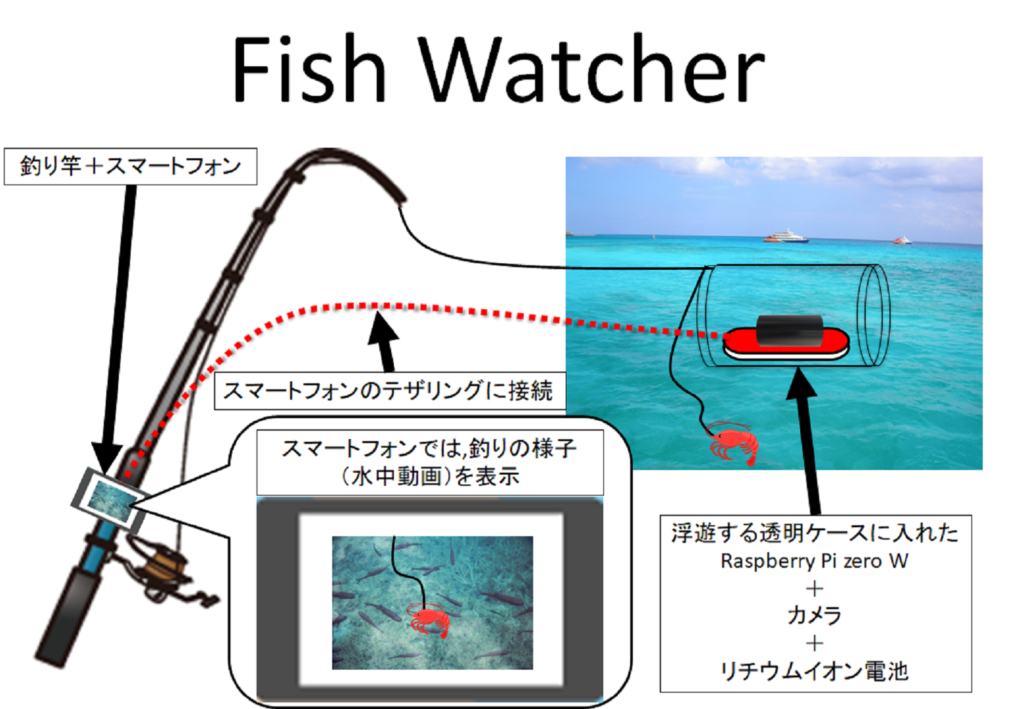
今回は、鳥獣ジャマー機能をカメラ付きRaspberry Pi zero W+モバイルバッテリー+太陽光パネル+散水装置の構成にて,守りたい範囲をカメラで撮影し,鳥獣が来たら散水で追い払う機能を実装し、カメラ画像無線LAN経由にて,Jetson TX2が撮影画像を取得し,鳥獣判定して,散水して農作物等守るものとし、検知したものはメールでアラート送信する。
2023年開発機能は姿勢推定の手の位置が特定の範囲に入った場合、メールでアラート送信する。
といったものとなります。
主な部品は以下のようになっております。
| 部品名 | 参考URL | 個数 |
| Raspberry Pi zero W | httphttps://raspberry-pi.ksyic.com/ | 1個 |
| マクセル株式会社 モバイル充電バッテリー USB1+TypeC1ポート 10000mAh 充電用ケーブル付 ブラック MPC-CBC10000PBK | https://a.r10.to/hY3BIa | 1枚 |
| Raspberry Pi HD Pi NoIRカメラボード PiNoir Camera Module V2 | https://amzn.to/467D4El | |
| FlexSolar ミニソーラーパネル 6W 5V 高性能単結晶 ソーラーパネル | https://amzn.to/3Ciey6K | 1個 |
| Jetson TX2 | 古いためもう販売してない | 1個 |
| USBカメラモジュール 赤外線カメラ usb 9712チップ赤外線ナイトビジョンライト IRカメラモジュール 1280×720 30 fps 56°カメラセンサーモジュール | https://x.gd/pfoJH | 1個 |
| [EnergyPower] 赤外線ライト SA6-IR 940nm不可視タイプ 赤外線照射距離40メートル 照射角60度 業務用赤外線投光器 防水防塵 明るさセンサー自動点灯 防犯・監視カメラ用 セキュリティ ナイトショット・暗視撮影用照明 IRライト LED 屋外・アウトドア対応 | https://x.gd/HaQ00 | 1個 |
【機能】
- 撮影機能(USB赤外線カメラJetson直つなぎ,Raspberry Pi zero W+赤外線カメラ)
- 給電+充電(モバイルバッテリー+太陽子パネル)
- 姿勢推定(Jetson TX2)
- 鳥獣ジャマー(Jetson TX2:物体検知,Raspberry Pi zero W:散水装置操作)
- メール送信(Jetson TX2)
本内容にてMaker Faire Tokyo 2024に申し込む予定です。
申請が通れば展示したいと考えています。