最近,自宅の庭に不審者が入り込んだり,ニュースでは農産物が窃盗にあったりと物騒な世の中になってきました。いつどこで誰が何をしているかわからないまま被害に合うのが嫌だなと思い,不審者を検知するためのガードアイシステム~ Guard Eye System ~を開発中です。
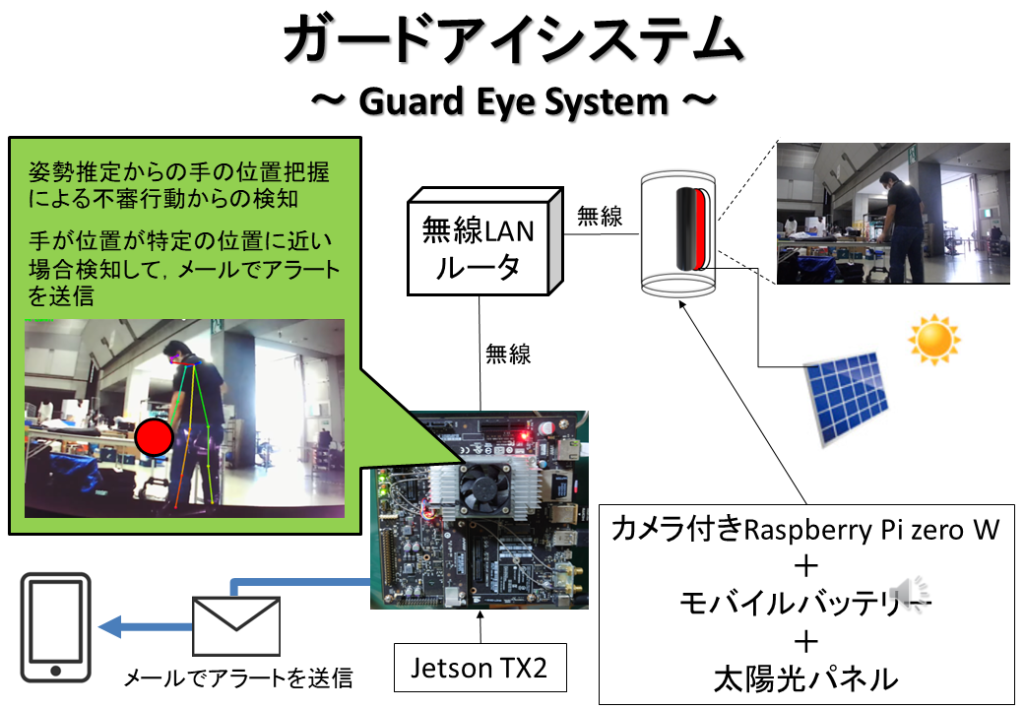
屋外にカメラ付きRaspberry Pi zero W+モバイルバッテリー+太陽光パネルの構成にて,守りたい範囲をカメラで撮影し,
カメラ画像無線LAN経由にて,Jetson TX2が撮影画像を取得し,姿勢推定処理にて,手の位置がどこにあるのかを把握し,農作物等守りたいものあるところに手が来たら検知するシステムとなります。
とりあえずは,プロトタイプ開発ということで,主な材料として以下の内容をそろえました。Jetson TX2は,もう古くて中古ぐらいでしか手に入らなそうです。売ってても昔の販売価格以上のお値段になっているようです。
| 部品名 | 参考URL | 個数 |
| Raspberry Pi zero W | httphttps://raspberry-pi.ksyic.com/ | 1個 |
| マクセル株式会社 モバイル充電バッテリー USB1+TypeC1ポート 10000mAh 充電用ケーブル付 ブラック MPC-CBC10000PBK | https://a.r10.to/hY3BIa | 1枚 |
| Raspberry Pi HD Pi NoIRカメラボード PiNoir Camera Module V2 | https://amzn.to/467D4El | |
| FlexSolar ミニソーラーパネル 6W 5V 高性能単結晶 ソーラーパネル | https://amzn.to/3Ciey6K | 1個 |
| Jetson TX2 | 古いためもう販売してない | 1個 |
【機能】
- 撮影機能(Raspberry Pi zero W+赤外線カメラ)
- 給電+充電(モバイルバッテリー+太陽子パネル)
- 姿勢推定(Jetson TX2)
- メール送信(Jetson TX2)
【実験】
姿勢推定を昨年度のMaker Faire Tokyo2022の設営動画にて実験
大体,姿勢推定できているなという結果になりました。
本内容にてMaker Faire Tokyo 2023に申し込む予定です。
申請が通れば展示したいと考えています。