電子工作:魚キャッチセンサー(ジャイロセンサ+Raspberry Pi2) No.04の続きです。
2016年7月24日(日)に2回目となる実証実験(実際の釣りで魚キャッチセンサーを使う)を実施しました。(in 江の島)
この日は3つのポイントにて実験しました。

図1 江の島釣りポイント1,2,3
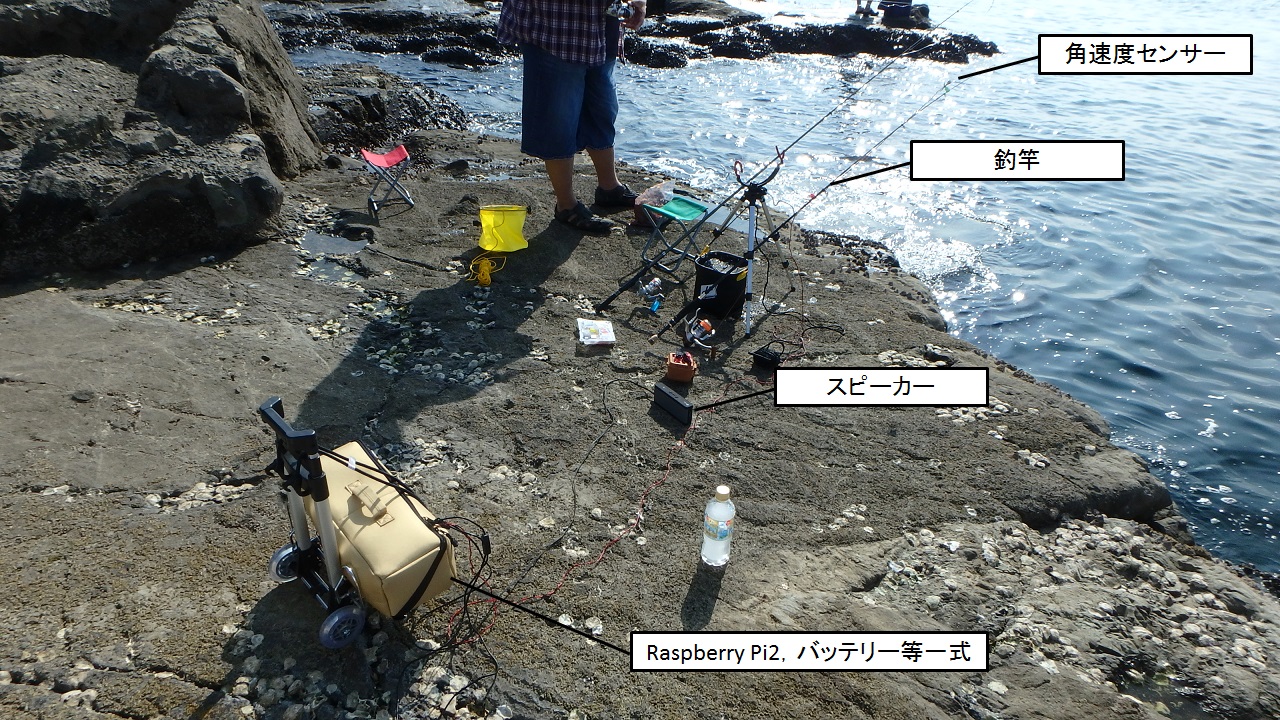
図2 魚キャッチセンサーの実験(ポイント1)
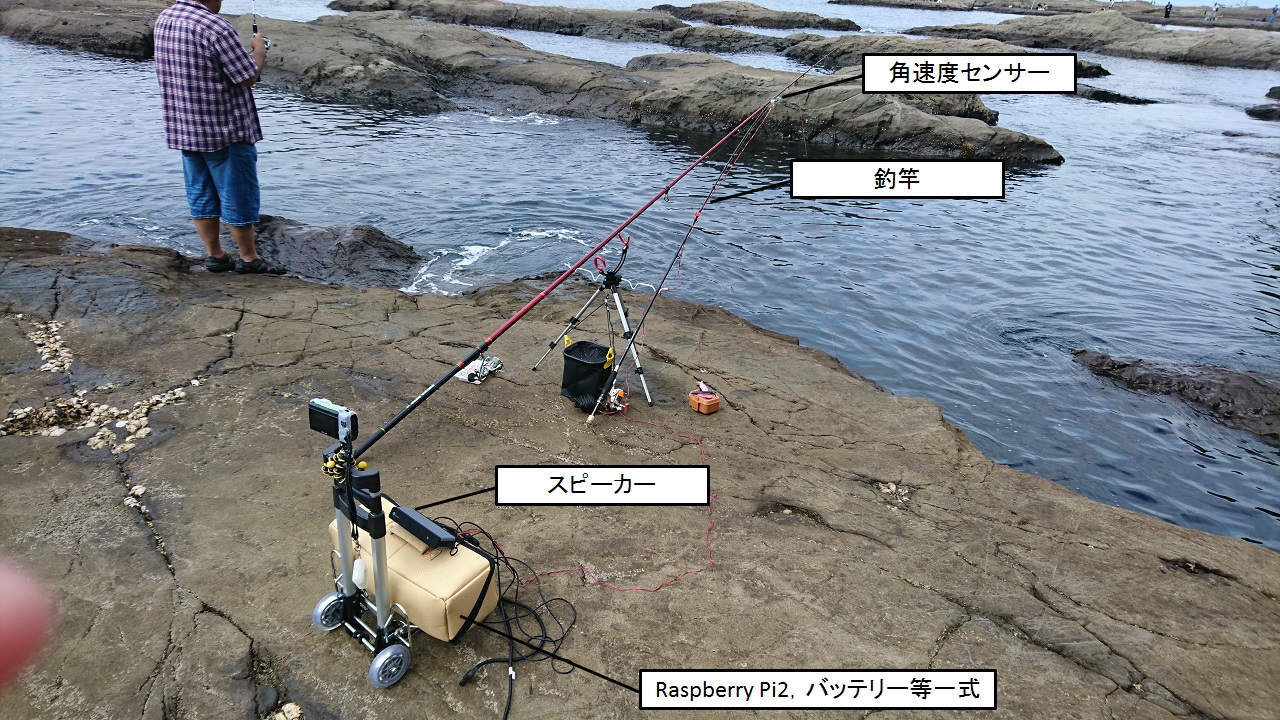
図3 魚キャッチセンサーの実験(ポイント2)
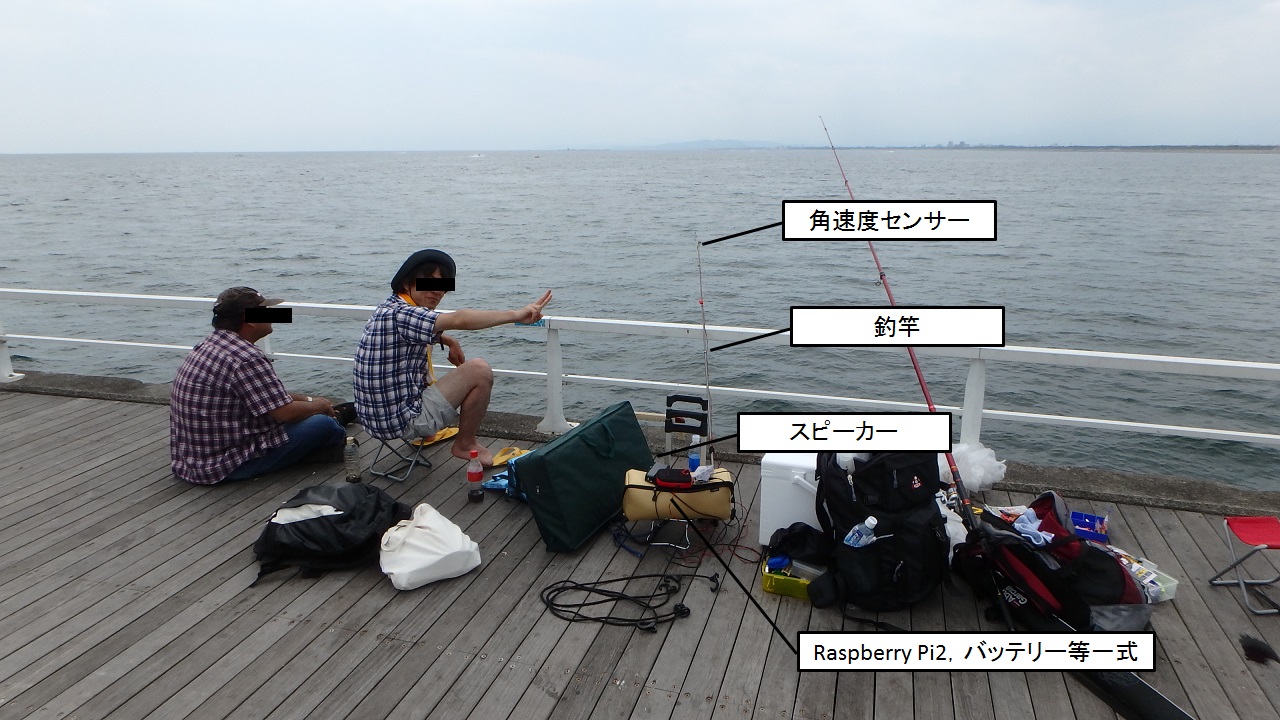
図4 魚キャッチセンサーの実験(ポイント3)
今回の実験では,前回の反省を踏まえ,スピーカーを新規購入し,角速度センサーへのケーブルが短かったので,長くしました,また角速度センサーは,ホットボンドで周りを固め,多少濡れても大丈夫なようにしました。
電子機器関連は以下の構成となります。
- Raspberry pi2
- パナソニック モバイルバッテリー 10,260mAh USBモバイル電源 QE-QL301-K
- 角速度センサへの配線(約4.5m,前回は約2.5m)
- TaoTronics 防水Bluetooth 4.0 ワイヤレスステレオスピーカー(新規購入)
- オーディオケーブル(新規購入)
天候は良く,実験日和だったのですが,ポイント1,2では魚が全くヒットしませんでした。
また,ポイント1,2は波があり,しかけは結構流れるのですが,特に問題はありませんでした。
しかし,針が海藻などに引っかかると波と海藻の動きで検知してしまうことがあり,この問題は解決が難しそうな感じでした。
ポイント3では,魚キャッチセンサーに反応があり,引き上げたのですが,残念ながらエサ取り検知にしかなりませんでした。とりあえず,エサが取られるときに検知はできていたので,魚は釣れませんでしたが,それなりの結果は得られたと考えています。(今回は,センサーにかかった時の音をFF7の戦闘勝利時の音にしてみました。)
動画1 実験動画(ポイント3)
今回の成果としましては,
- 船などの波では,センサーは反応しない(ただし,海藻にひっかかったりすると音がなる)
今後の改良の方向性として,
- ヒットした後の音がうるさいのを直す
- 配線をなくす(無線でできる方法の模索)
と考えています。
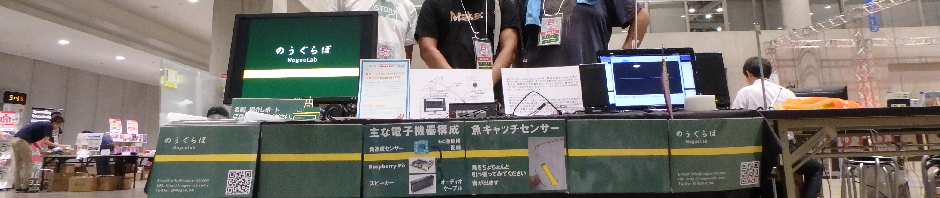
とりあえず,ある程度動作確認もできたので,Maker Faire Tokyo 2016に向けての準備をしていきたいと思います。
Maker Faire Tokyo 2016ののうぐらぼ紹介URL
http://makezine.jp/event/makers2016/noguelab/
電子工作:魚キャッチセンサー(ジャイロセンサ+Raspberry Pi2) No.06に続きます。