鳥獣ジャマー( Maker Faire Tokyo 2018の展示物 )に温湿度センサ,土壌湿度センサ,IBM Cloudを用いて簡易的な状態を管理できるデモを作成した。
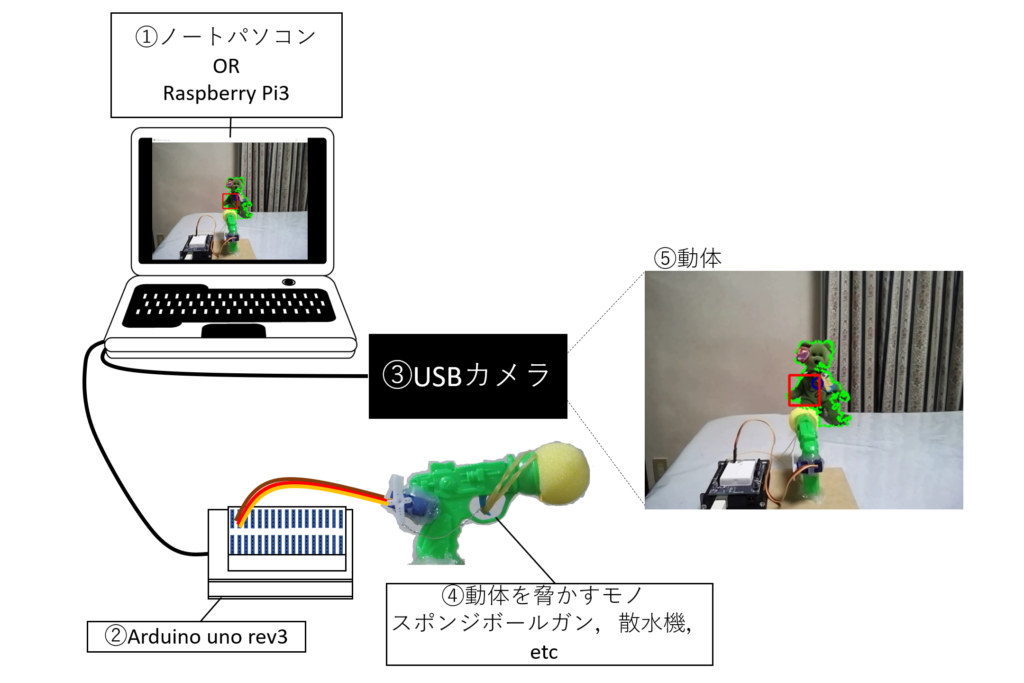
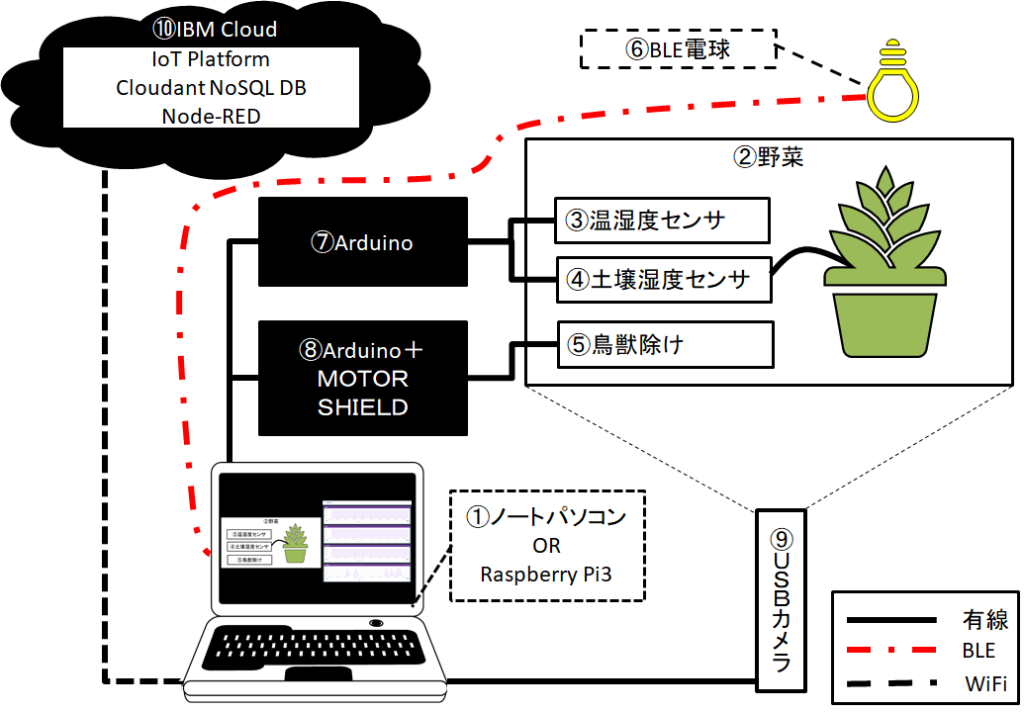 図1 鳥獣ジャマ+IoT家庭菜園ープロトタイプ
図1 鳥獣ジャマ+IoT家庭菜園ープロトタイプ
①ノートパソコン OR Raspberry Pi3: 全体の処理はPythonで行い,OpenCVの画像処理による鳥獣の検知,シリアル通信にて,各種センサ情報を取得,取得したセンサ情報,鳥獣の検知情報は,IBM Cloudに送信する。
②野菜:家庭菜園で育てる野菜。
③温湿度センサ:DHT11 temperature and humidity sensor module。
④土壌湿度センサ:YL-69 soil moisture sensor。
⑤鳥獣除け:畑では水を撒く装置を使うが,今回のデモでは,MABUCHI RF-500TB ソーラーモーター02を使用。
⑥BLE電球:異常検知時のお知らせ,また,室内の場合は,LEDで野菜を育てるのに使用する。KAWAYOU LED電球を使用。
⑦Arduino:温湿度センサ,土壌湿度センサを操作し,値を取得してシリアル通信にて結果をパソコンへ送信する。
⑧Arduino+MOTOR SHIELD:ソーラーモーターを回すのに使用する。
⑨USBカメラ:野菜の状況を監視するために使用する。ELP Webカメラ 1MP 防犯カメラ 屋外 防水 カメラUSB 720P H.264 赤外線ナイトビジョン USBドームカメラを使用。
⑩IBM Cloud:各種センサ情報,異常検知情報を収集し,状態を監視することができる。
鳥獣ジャマー+IoT家庭菜園のプロトタイプの動作状況は,動画1の実験動画のようになっている。
動画1 鳥獣ジャマー+IoT家庭菜園
【開発言語】
Python:全体の処理、画像処理,シリアル通信,IBM Cloudとの通信にて使用。
Visual C#:BLE電球の操作に使用。
C言語:Arduinoのプログラムにて使用。
【成果】
Maker Faire 2018では動体検知処理を入れていたが,今回はそれを抜き,物体の認識処理のみで大体の検知はできることを確認した。
各種センサ情報,異常検知情報をIBM Cloudにアップし,サイト上で状況を確認できた。
【今後の作業】
- ⑦,⑧の無線化(Bluetoothによる無線化)
- 現在はノートPC上での動作のため,Raspberry Pi3への移植
- 実際に野菜を育て
【その他】
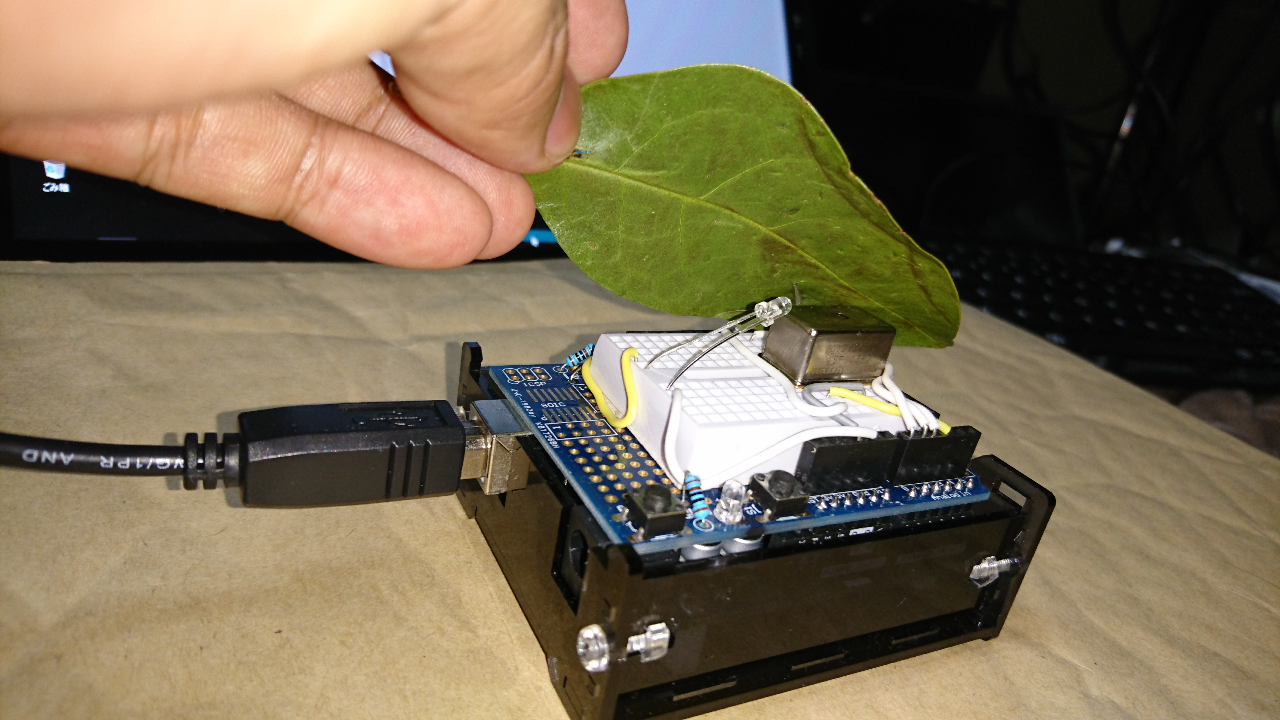
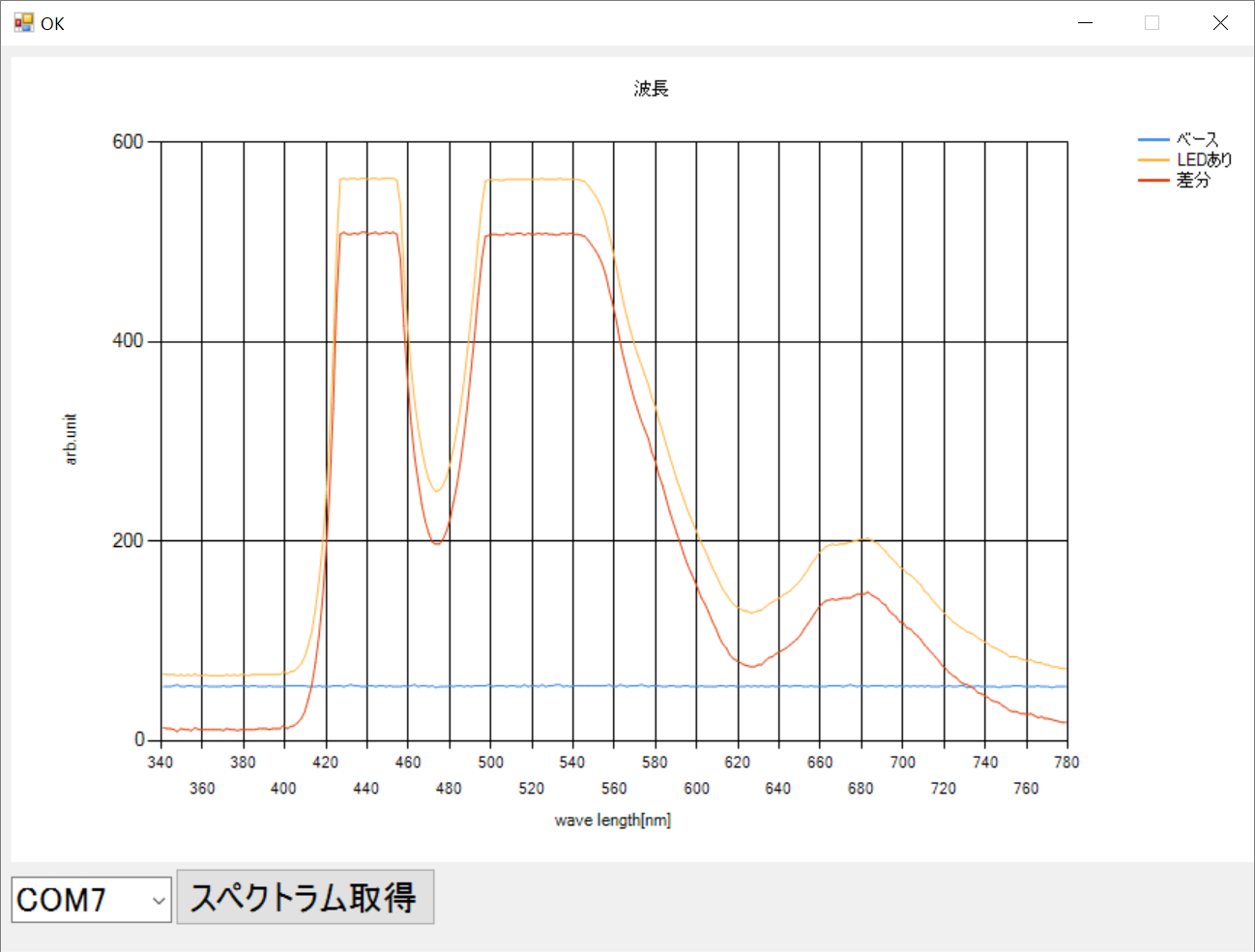
Maker Faire Tokyo 2017で展示した植物生育診断装置の改良に着手したいなと思う今日この頃。
トリリオンノードが売り出されたら各種装置の小型化を目指したい。
Maker Faire 2019に通りました。8/3,8/4に展示する予定です。















 ⑩また来年も参加できるよう頑張っていきたいと思います。
⑩また来年も参加できるよう頑張っていきたいと思います。